Technical
22 NSC
March 19
Stability and second order
effects on steel structures:
Part 1: fundamental behaviour
Ricardo Pimentel of the SCI introduces the topics of buckling phenomenon, second
order effects and the approximate methods to allow for those effects. In part 2, the
various methods will be compared to the results from a rigorous numerical analysis.
When a structure is loaded, deformation occurs, and the internal
forces within the structure are modified. If at some point an
increase of load (and deflection) does not modify the internal
forces, the structure became unstable (only considering elastic
buckling). In a perfect structure, a theoretical sudden instability
exists when the applied loads reach a critical load. However,
because real structures are always imperfect, the so-called sudden
instability does not exist – an initial bow imperfection in a strut
will increase as the applied load increases. When the applied load
becomes closer to the theoretical critical value, the deformation
increases rapidly. This leads to the following conclusions: (i) when
loaded, a strut tends to diverge from its initial position “guided” by
the initial bow imperfection; (ii) the magnitude of the initial bow
imperfection will have influence in the critical load of the strut; (iii)
the applied load will have impact on the deformed shape, which
in turn will influence the buckling resistance of the member.
From the concepts explained above, the assessment of
instability problems must consider the effects of the deformations
due to the applied loads. Even for the theoretically perfect
structures, the prediction of the load that leads to sudden
instability requires the assumption of a deformed shape of the
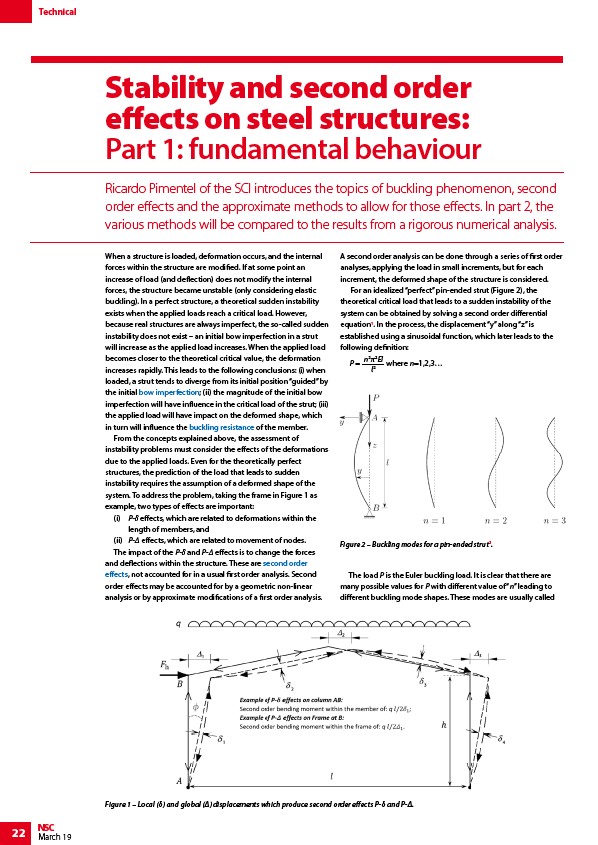
system. To address the problem, taking the frame in Figure 1 as
example, two types of effects are important:
(i) P-δ effects, which are related to deformations within the
length of members, and
(ii) P-Δ effects, which are related to movement of nodes.
The impact of the P-δ and P-Δ effects is to change the forces
and deflections within the structure. These are second order
effects, not accounted for in a usual first order analysis. Second
order effects may be accounted for by a geometric non-linear
analysis or by approximate modifications of a first order analysis.
A second order analysis can be done through a series of first order
analyses, applying the load in small increments, but for each
increment, the deformed shape of the structure is considered.
For an idealized “perfect” pin-ended strut (Figure 2), the
theoretical critical load that leads to a sudden instability of the
system can be obtained by solving a second order differential
equation1. In the process, the displacement “y” along “z” is
established using a sinusoidal function, which later leads to the
following definition:
P = n22EI
l2
where n=1,2,3…
Figure 2 – Buckling modes for a pin-ended strut2.
The load P is the Euler buckling load. It is clear that there are
many possible values for P with different value of “n” leading to
different buckling mode shapes. These modes are usually called
Figure 1 – Local (δ) and global (Δ) displacements which produce second order effects P-δ and P-Δ.
/Allowing_for_the_effects_of_deformed_frame_geometry#Member_bow_imperfections
/Member_design#Buckling_resistance_of_members
/Allowing_for_the_effects_of_deformed_frame_geometry#Second_order_effects
/Allowing_for_the_effects_of_deformed_frame_geometry#Second_order_effects